Введение
Ортез применяет силы к человеческому телу и может изменить способ воздействия сил на него. Это делает ортез по своей природе биомеханическим устройством. Биомеханика особенно важна для понимания того, как возникают отклонения в походке и проблемы с давлением, а также как их можно исправить. Биомеханика также важна для понимания того, как ортез достигает улучшенного положения тела безопасным и комфортным образом.
Сила
Сила – это любое взаимодействие, которое стремится изменить движение объекта. Силы важны в ортопедических устройствах. Ортопедическое устройство применяет силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается на определенной площади кожи. Это создает давление по следующему уравнению.
Давление равно силе по площади (P = F / A)
Когда площадь, на которой распределена сила, становится больше, давление уменьшается. Если кто-то наступит вам на ногу в туфле на шпильке (туфельке с тонким каблуком), будет много давления (и боли).
Тот же человек, стоя на вашей ноге в туфле с большей поверхностью, будет оказывать меньшее давление (и меньше боли), потому что площадь соприкосновения больше. Тот факт, что это один и тот же человек, означает, что сила в этом сценарии постоянна.
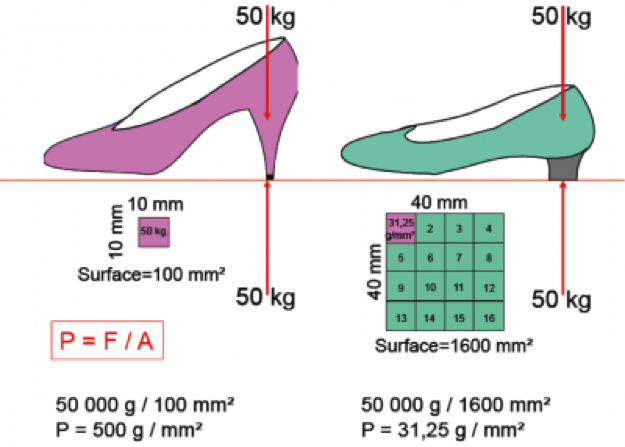
Каблук туфли на шпильке создаст большое давление на единицу площади. Когда площадь увеличивается (на картинке справа), давление уменьшается. (Адаптировано из Зеленой книги - Hmayak Tarakhchyan, использовано с разрешением).
В приведенном ниже примере мы видим, как давление также уменьшается за счет увеличения площади контакта под стопой.
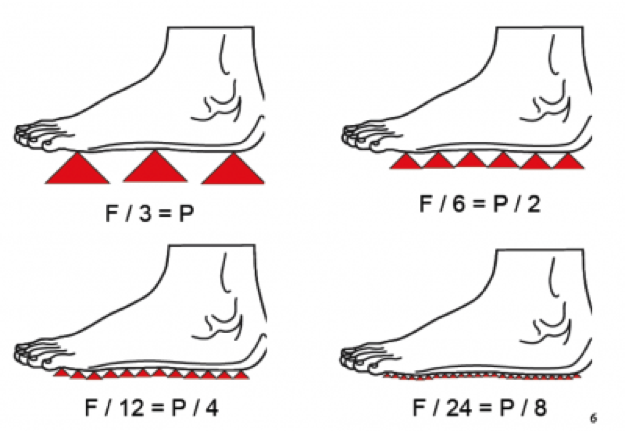
(Адаптировано из Зеленой книги - Hmayak Tarakhchyan, использовано с разрешением)
В этом эксперименте с "кроватью из гвоздей" мы видим, что давление уменьшается по мере увеличения площади. Сила снова остается постоянной.
Соображения по поводу ортопедического устройства
Ортопед должен убедиться, что конструкция ортеза достигает наилучшего возможного распределения давления. Традиционные ортезы, сделанные из металла и кожи, как правило, имеют меньшие поверхности, что означает, что давление на интерфейсе ткань/устройство будет выше[1].
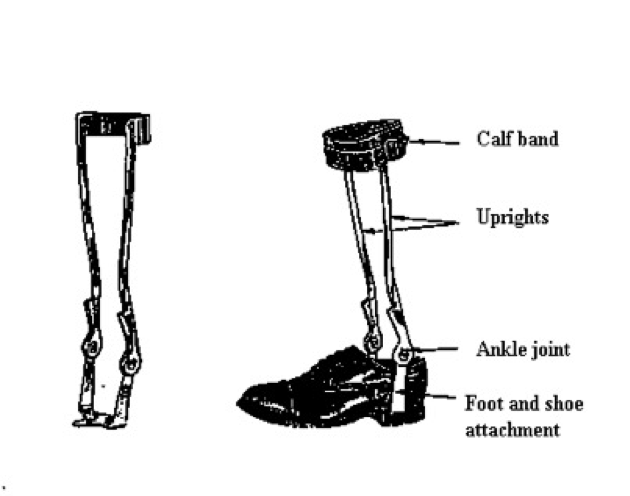
Изображение обычного AFO, уменьшенная площадь поверхности приводит к увеличению давления.
Более современные термопласты покрывают большие площади тела и, следовательно, распределяют силу на больший участок. Это приводит к снижению давления на коже.

Пластиковый AFO с полным контактом уменьшает давление, так как сила распределяется по более широкой области.
Таким образом, казалось бы, что мы всегда должны использовать конструкцию ортеза, которая покрывает максимальную площадь поверхности, чтобы обеспечить комфортное прилегание. Однако мы также должны учитывать способность подлежащих тканей выдерживать давление, оказываемое ортезом, так как костные выступы, рубцовая ткань и другие чувствительные места могут не выдерживать прямо прикладываемое давление. В процессе исправления отливки над костными выступами могут быть выполнены облегчения или наращивания для распределения нагрузки по зонам тканей, которые могут её выдерживать, и снятия нагрузки с костных выступов.
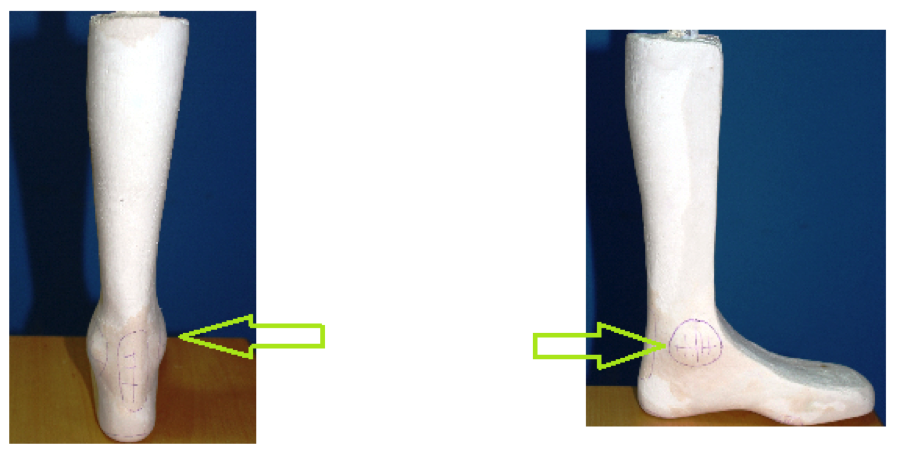
(Фото Грега Халфорда 2016)
Стрелки указывают, где произошло наращивание гипсом. Это изменит форму финального AFO, чтобы уменьшить давление в этой точке.
Уплотнители, изготовленные из низкоплотных материалов, таких как Pelite, EVA или PPT, также могут быть инкорпорированы над костными выступами в процессе изготовления устройства для дальнейшего снижения давления в этих областях, поскольку они сжимаются под нагрузкой.
Если часть ортеза вызывает неприятно высокое давление, пользователь или родитель/опекун могут попросить удалить эту часть. Иногда, когда это делается, площадь, на которой распределена сила, уменьшается. Следовательно, по вышеуказанному уравнению P=F/A, давление на самом деле увеличивается. Это может привести к увеличению боли через некоторое время.
Ортез прикладывает силы непосредственно к коже ребенка и подлежащим анатомическим структурам, чтобы достичь своих функциональных целей. Поэтому области контакта между мягкотканным интерфейсом и ортезом чрезвычайно важны, так как если ортез не удобен, ребенок не будет его носить[2].
Ткань на интерфейсе устройство/ткань не всегда имеет равномерную толщину. На рисунке… мы можем увидеть, что область ткани ‘F’ относительно твердая, а области ткани ‘S’ более мягкие.
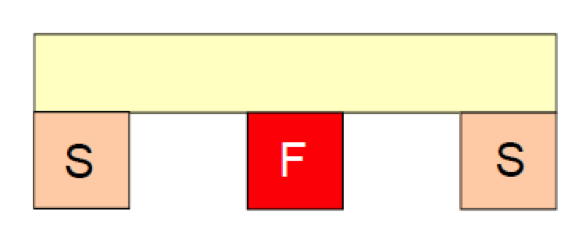
(Адаптировано из Зеленой книги - Hmayak Tarakhchyan, использовано с разрешением)
Если наш ортез формируется, чтобы точно повторять внешнюю форму конечности, давление не будет равномерно распределено, и область ‘F’ будет испытывать относительно большее давление по сравнению с более мягкими областями ‘S’. Снова же, приложение облегчений или наращиваний во время исправления отливки области ‘F’ поможет снять давление с этой области. Внутренние вдавливания для увеличения давления на области ‘S’ дополнительно помогут равномерно распределить давление по этим более мягким тканям.

(Адаптировано из Зеленой книги - Hmayak Tarakhchyan, использовано с разрешением)
Биомеханика ортопедической конструкции 3-точечного давления
Ортопеды используют 3-точечное давление в большинстве ортопедических конструкций для контроля углового перемещения[3].
Система трехточечных сил позволяет изменять или контролировать угол на суставе, например, при контроле подошвенного сгибания стопы в AFO или вальгусной деформации колена в коленном ортезе. Она возникает, когда три силы прикладываются к сегменту с первичной силой (F1), приложенной между двумя дополнительными противодействующими силами (F2 и F3), и сумма всех трех сил равна нулю. Величина и местоположение первичной силы (F1) находятся в точке, где движение либо подавляется, либо облегчается в зависимости от функциональных требований ортеза. Примеры часто встречающихся систем трехточечных сил в нижней конечности можно увидеть ниже.
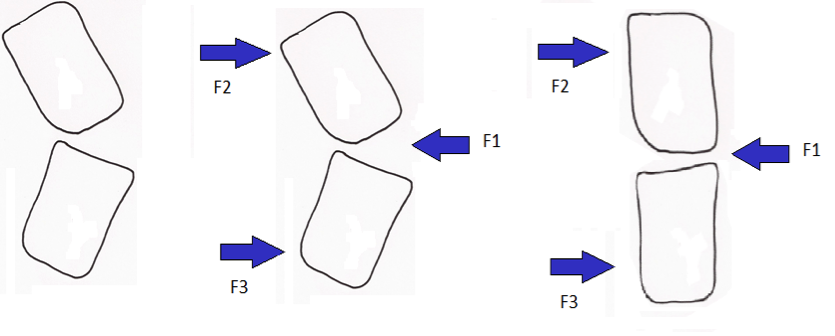
(Фото Грега Халфорда 2016)
Четырехточечные системы сил применяются в ортопедических конструкциях для достижения трансляционного контроля, предотвращающего смещение одного сегмента относительно другого. Они часто используются в коленных бандажах для контроля смещения большеберцовой кости относительно бедренной кости при отсутствии передней крестообразной связки колена[4].
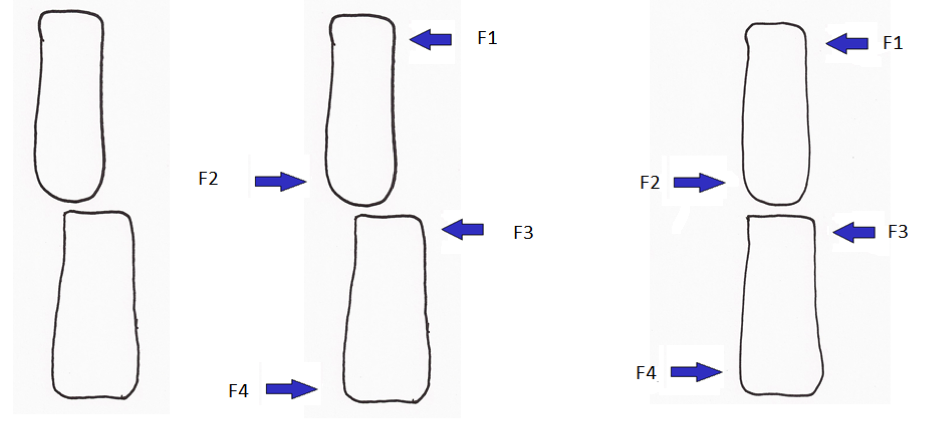
(Фото Грега Халфорда 2016)
Реактивная сила опоры
Реактивная сила опоры (GRF) возникает, когда происходит контакт с опорной поверхностью, она равняется и противопоставляется силе, связанной с массой тела, проходящей через стопу к поверхности земли[5].
Следует отметить, что 'сила, связанная с массой тела', включает в себя момент и ускорения массы тела, а также просто эффект гравитации на нее. Поэтому она отличается и в то же время схожа с линией веса.
Регулировка протеза изменяет походку путем манипуляции положением нижней конечности и суставов протеза относительно реактивной силы опоры - подробнее читайте здесь.
GRF не используется в клинической практике во многих местах из-за сложности его получения в режиме реального времени. Врачи могут попытаться понять движения, которые они наблюдают, поняв, какое влияние GRF может оказывать на человеческое тело.
Моменты или Токи
Если сила не действует напрямую на ЦМ объекта, она заставит объект вращаться[5]. Если сила не действует через середину сустава с другим сегментом, она изменит угол сустава. В приведенном ниже примере стопа и нога должны рассматриваться как два сегмента, соединенные в тало-круральном суставе. Когда GRF 'толкает' стопу вверх, она стремится переместить стопу в дорсифлексию. Сила создает момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава).
В нормальных движениях человека момент, созданный внешне приложенной реактивной силой опоры, балансируется (в большинстве случаев) внутренне генерируемой силой мышцы, которая создает противоположный момент.
Это общее правило не всегда на 100% верно, но является полезным приближением. В случае быстрого или мощного движения эти моменты не сбалансированы. Также в случае достижения коленом полного разгибания в стоянии это натяжение тканей заднего отдела колена, которое обеспечивает балансирующий момент.
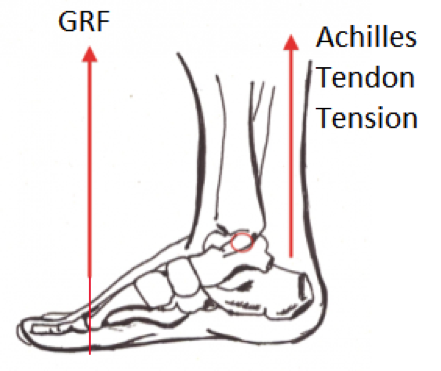
В этом примере момент дорсифлексии, созданный передней GRF, балансируется плантаторами за счет натяжения ахиллесова сухожилия. Эта мышца имеет фиксированное плечо рычага.
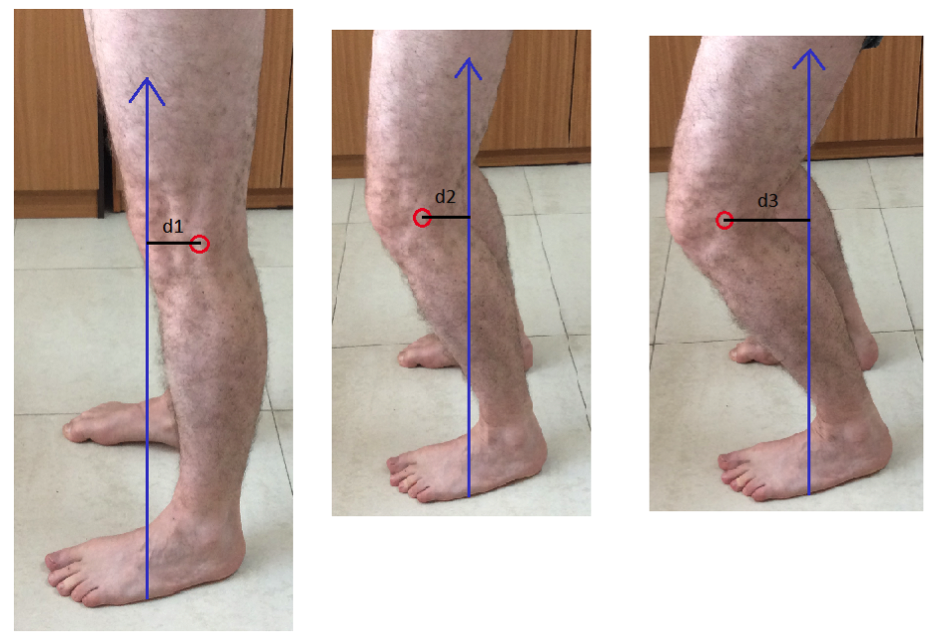
GRF и коленный сустав
Если GRF перед коленом, то GRF стремится разогнуть колено, в то время как натяжение задней капсулы сустава обычно сопротивляется, удерживая колено в нейтральном положении. (См. A)
Если GRF оказывается прямо за коленом, GRF с плечом рычага d2 сгибает колено. В этой ситуации квадрицепс должен быть активным, чтобы предотвратить сгибание колена. (См. B ниже.)
Если GRF находится на большем расстоянии за суставом колена, то есть длинное плечо рычага (d3) от линии действия GRF до центра сустава. Это увеличивает величину создаваемого момента (сила, умноженная на плечо рычага), который стремится согнуть колено. Это увеличивает потребность в квадрицепсе, требуется более сильное сокращение квадрицепса.
Одна из целей ортопедической терапии для детей с ДЦП заключается в нормализации положения и времени движения GRF, так как это приведет к нормализации паттернов активации мышц у детей. Когда колено находится в значительном сгибании, это увеличивает потребление энергии за счет увеличения величины требуемых сокращений мышц.
 (A) (B) (C)
(A) (B) (C)
Ортезисты могут изменить точку приложения реактивной силы опоры через конструкцию ортеза. Перемещая стопу в относительное плантаторное сгибание, GRF перемещается вперед, увеличивая момент разгибания колена.
Для более подробного изучения того, как напольный ортез AFO изменяет момент разгибания колена, см. здесь.
На практике биомеханические принципы дизайна AFO изменяют положение и движение тела. Использование биомеханических принципов для ортезов должно устранять небезопасное давление, повышая комфорт при приложении сил к человеческому телу, которые улучшают клинические обстоятельства для пользователя. Понимание биомеханики важно для ортезистов и тех, кто обращается к ортезисту, так как биомеханические принципы являются центральными для работы ортеза.
Ссылки
- ↑ Ортезы в реабилитации. FA Davis. 1998.
- ↑ Лусарди М, Хорхе М, Нильсон С. Ортезы и протезы в реабилитации. Третье издание. 2013.
- ↑ Чалмерс Д, Хамер Г. Точечная динамическая ортеза. Протезы и ортезы Интернационал, 1985. 9, 115-116
- ↑ Льюис Дж, Лью В, Стульберг СД, Патрончак Р, Шайбут Г. Новая концепция в ортезировании — Система ортезирования колена Северо-Западного университета Часть II: Полный ортез. Ортезы и протезы. 1984. 38(1): 13-28.
- ↑ 5.0 5.1 Мидоус Б, Бауэрс Р. Атлас ортезов и вспомогательных устройств (Пятое издание), 2019.